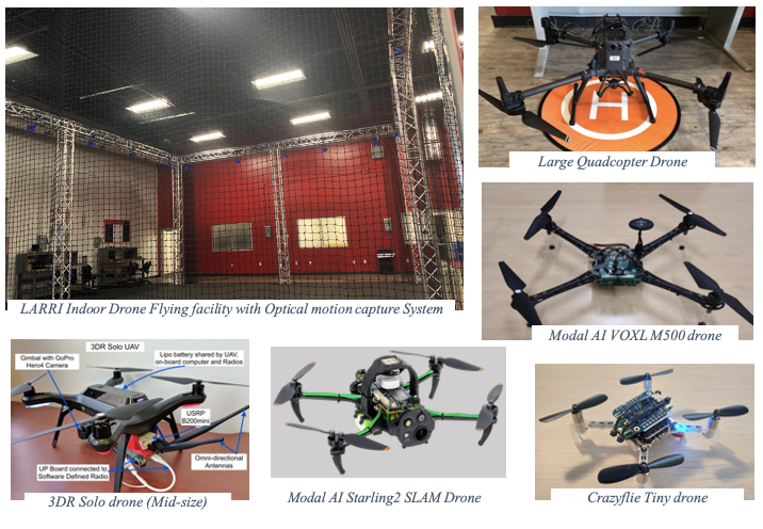
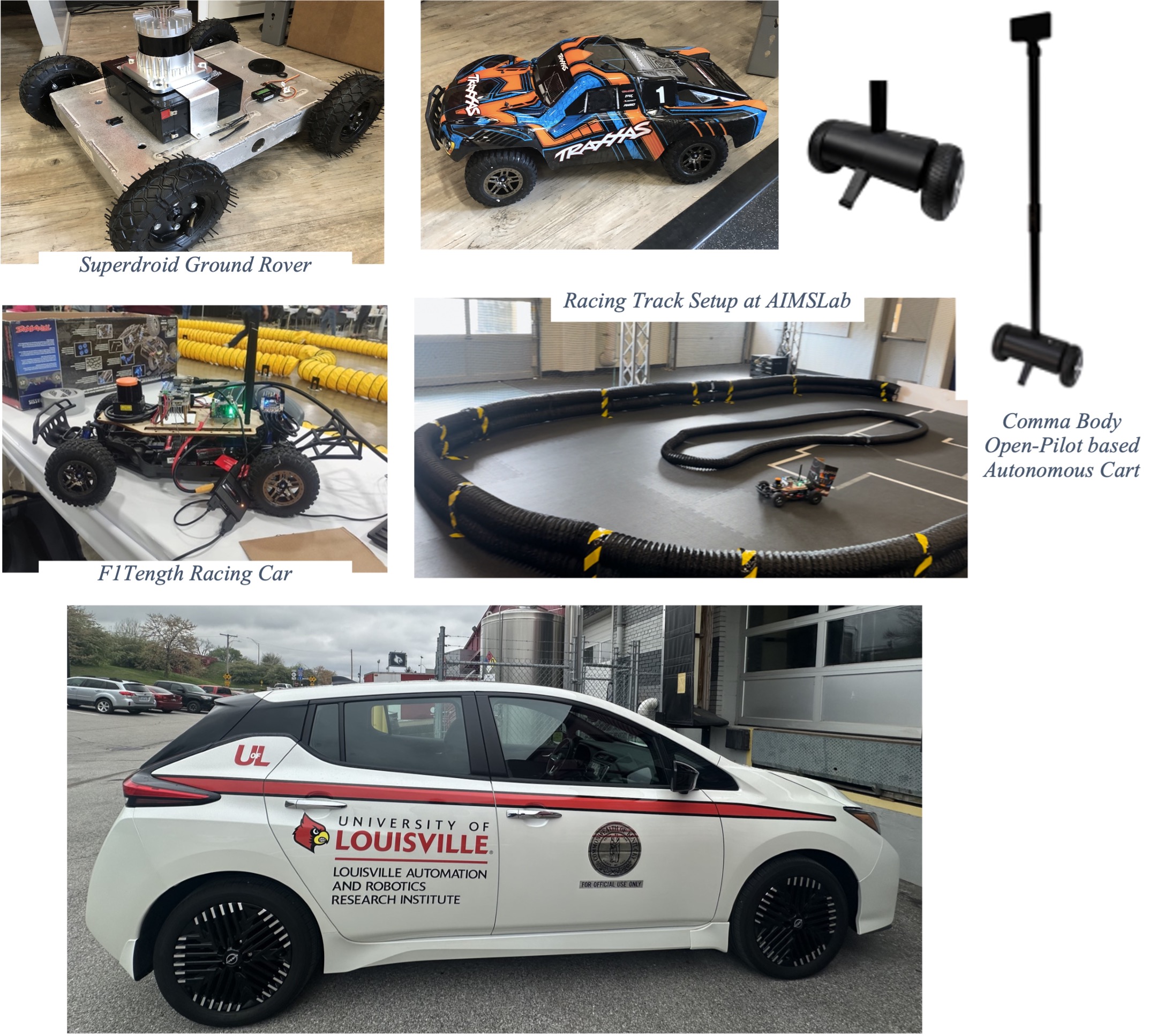
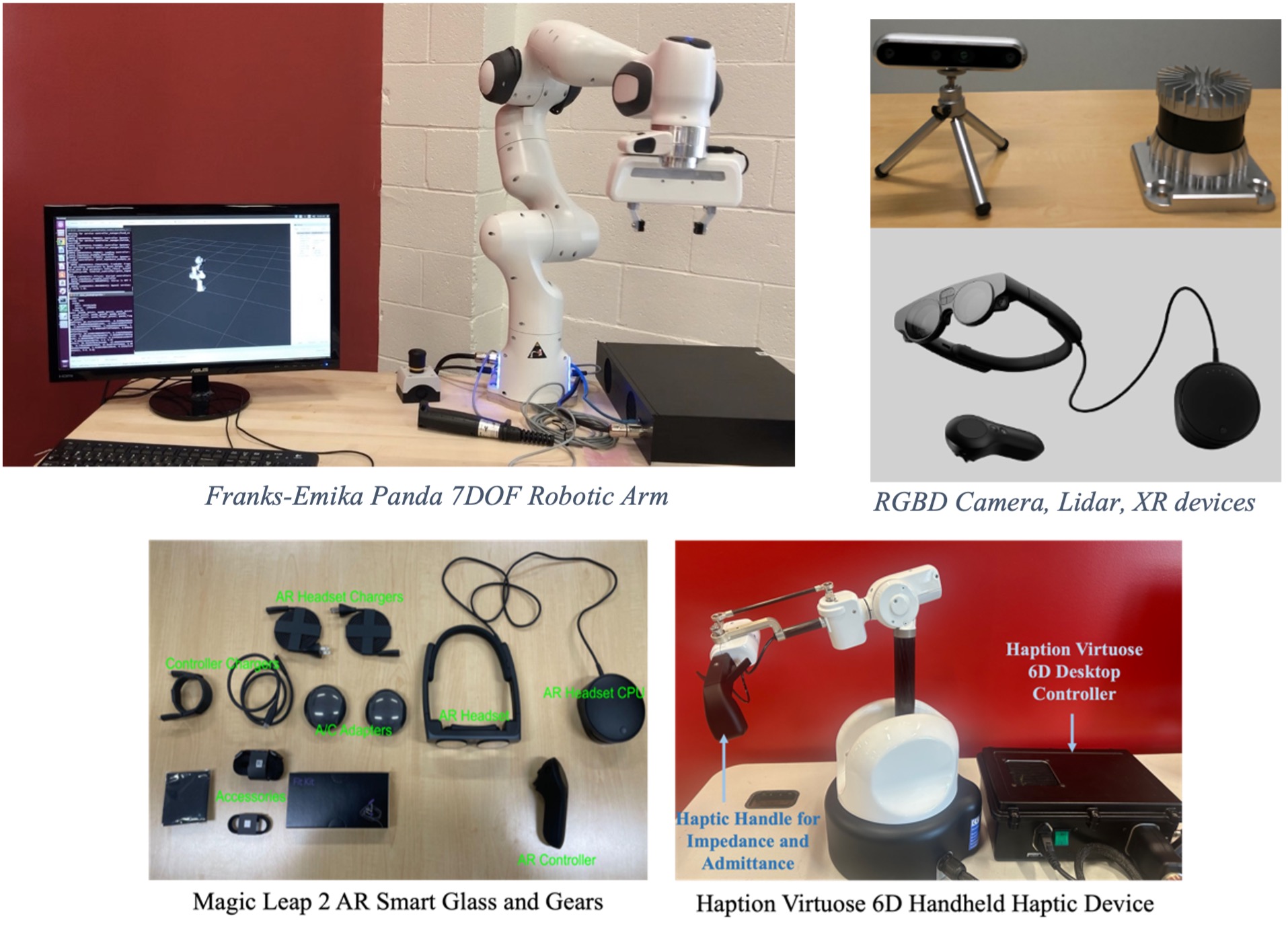
The Autonomous Intelligent Mobile Systems Laboratory (AIMSLab) was established in 2021 as one of the major labs at the Louisville Automation and Robotics Research Institute (LARRI) at the University of Louisville (UofL). AIMSLab housed in the LARRI aims at conducting advanced studies and development of autonomous and Intelligent systems including unmanned aerial vehicles, ground rovers, connected and autonomous vehicles, industrial robotic arms, metaverse applications, and Wireless and Mobile innovations. This is done through novel integration of sensing and intelligent decision-making in the space of collaborative robotics using AI and adaptive sensing, as well as the exploration of multi-level edge and cloud computing capabilities. AIMSLab provides a very open, inclusive and collaborative environment and embraces researchers from different background, culture and demography. It provides a cutting-edge facility equipped with a lots of mobile robots, sensors, systems and tools and connects with several other labs located at LARRI for close collaboration with other engineering departments and also the school of medicine for healthcare related research.
Some past projects are listed here: Projects
AIMSLab inhabits a large high-bay space at LARRI, which is optimized for indoor aerial robotic flight and ground vehicle control. High-precision tracking and high frequency control loops are facilitated by an optical tracking system using 22 Optitrack cameras that provides over 12,000 cubic feet of test room with millimeter-precision reporting. The entire netted space is remote controlled with sliding panels which opens to provide space for other research, e.g., mixed reality metaverse and experiments with ground robots. The positioning results, within 1mm, can be published to a ROS topic at a rate of one update per several milliseconds. The entire system latency has been measured to less than 7.5 milliseconds. This permits testing of flight control algorithms in a controlled, indoor setting without requiring the setup and coordination of an outdoor GPS-assisted flight. Furthermore, it accelerates development of low-cost LiDAR-based imaging as indoor-rated sensors can be used for evaluation. An automatic, retractable netting system that encloses the cage at all faces permits safe operation for researchers, while allowing unimpeded access when aircraft are not in flight.