My current reserach focuses on Computing and Communications in various Internet-of-Things paradigms. My recent research efforts are described into the following themes:
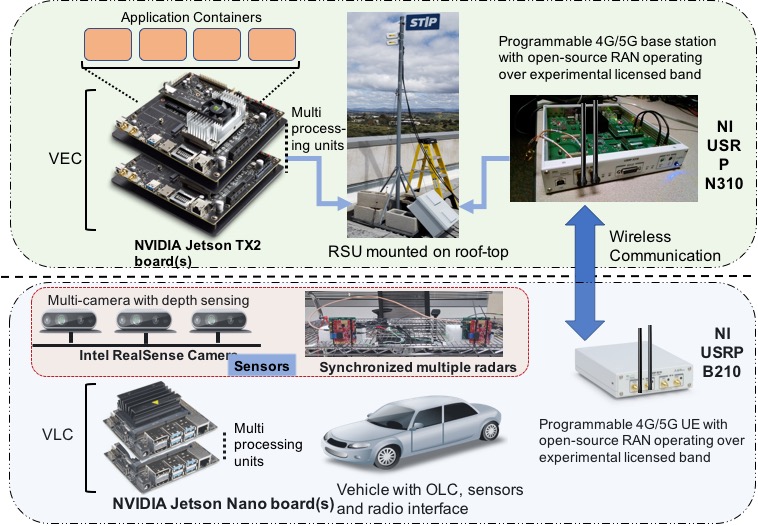
In smart transportation systems, the local perception based on one vehicle’s sensor data may not yield high accurate global perception and might not benefit the legacy vehicles. Multi-sensor fusion can greatly improve the vehicular perception by collaborative computations with the help of edge server. However, the V2X communication over wireless channel can impact due to high mobility and handover, as it may require handing over the last state of the computation. We aim to create efficient task partitioning algorithm between vehicle(s) and road side edge computing nodes and real-time data multi-sensor (e.g., multi-cameras, multi-radars) fusion algorithm at the edge to improve the accuracy of collaborative vision. We are building a prototype testbed containing smart vehicles, small cell radios for C-V2X communication and edge computing nodes. In collaboration with the cities we plan to deploy the distributed testbeds and further develop predictive models from collected data for proactive handovers that is resilient to computation loss.
STIP Project, DAC 2020, STIP_Demo
Collaborators: Samuel Thornton (UCSD), Yujen Ku (UCSD), Sujit Dey (UCSD)
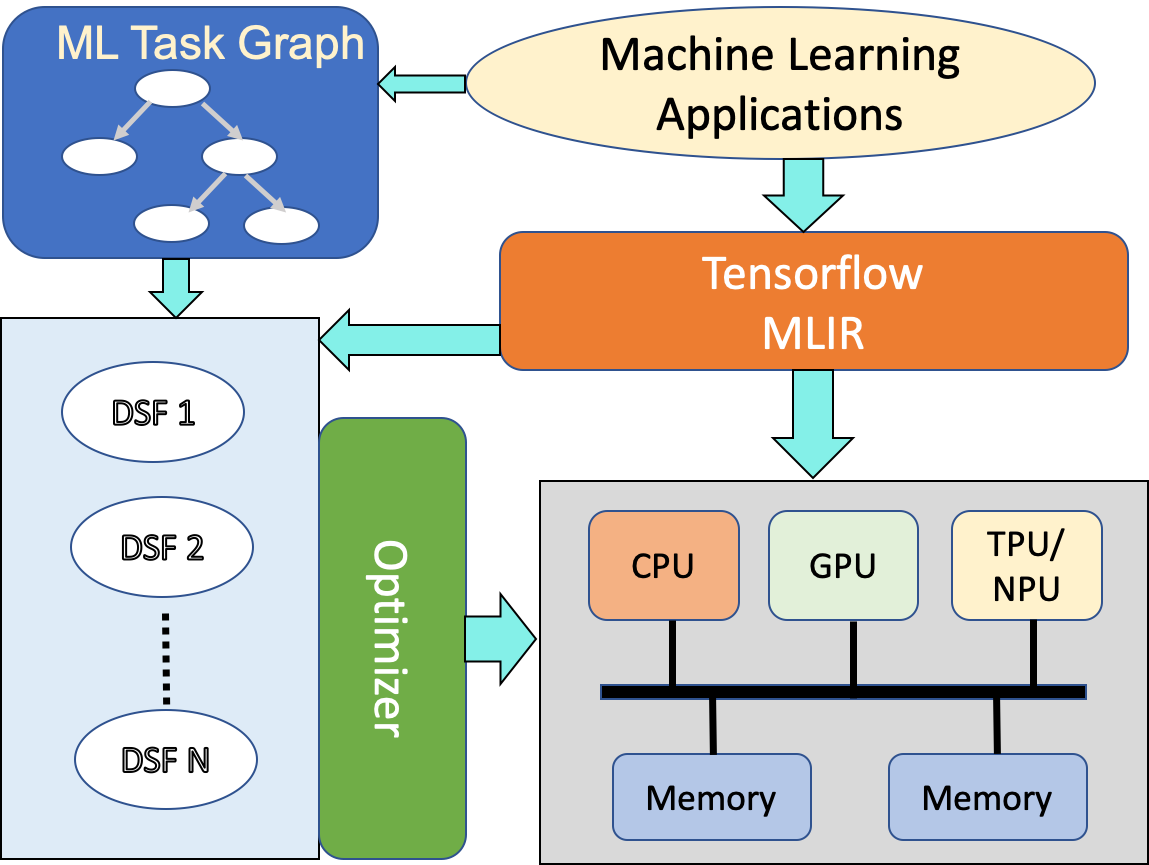
In complex computing-intensive tasks for AI-driven systems, the performance of the application and system needs to be jointly evaluated. In order to optimize the power, area and speed of the systems along with high accuracy and low latency of the applications, e.g. deep learning algorithms, we need to decompose the complex algorithms into domain specific functions (DSF). The granularity of the DSFs depends on the interoperability of the functions on different devices as well as their reusability in different machine learning algorithms. The DSFs are needed to be profiled on different systems to understand the best device for a specific DSF and algorithm. Once the DSFs are defined and profiled, we will need to formulate multi-objective optimization problems based on performance of different components on different software and hardware platforms, e.g., CPU, GPU and accelerators. We are working on this project to conduct a design-space exploration for software-hardware co-design for an application-driven adaptive and efficient computing systems.
Collaborators: Sujit Dey (UCSD), Anand Raghunathan (Purdue University)
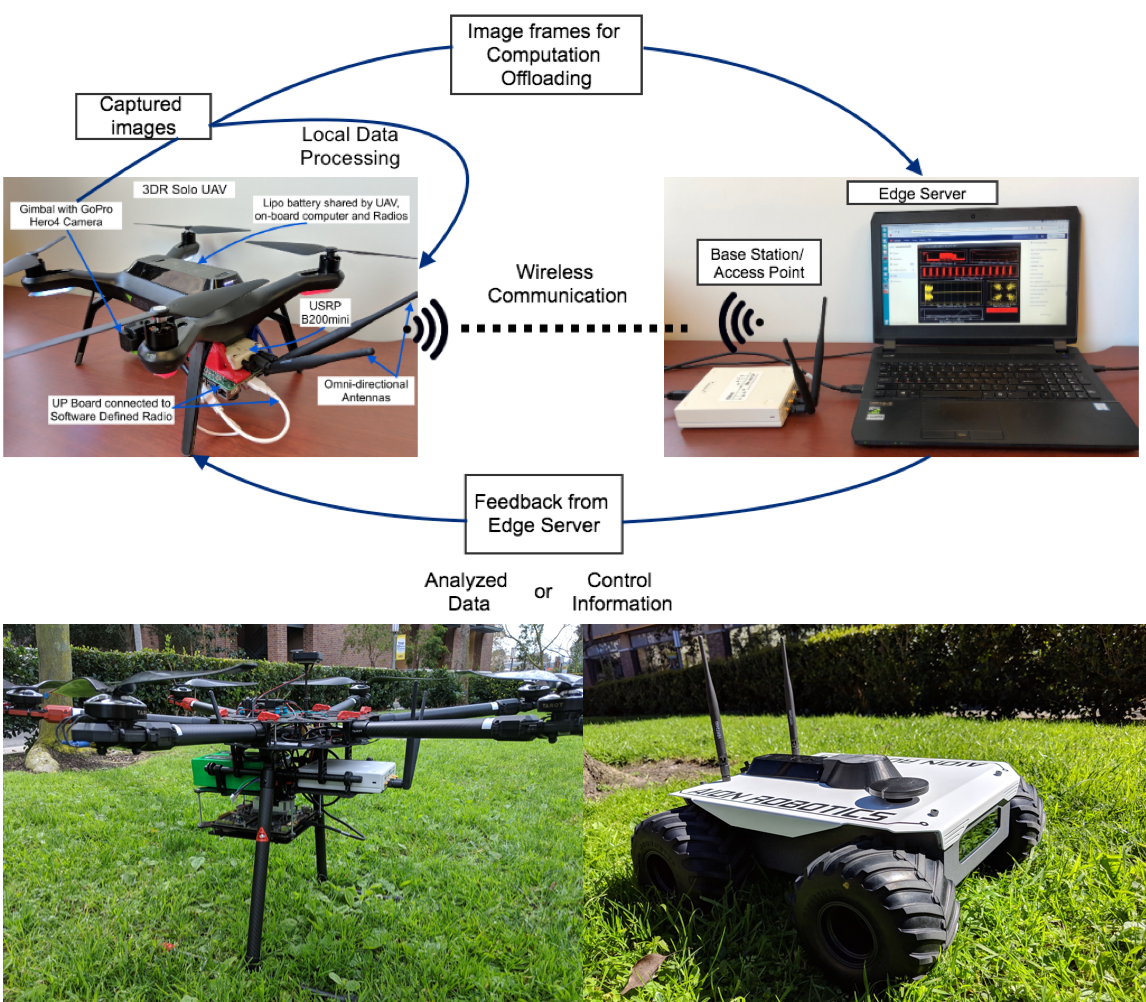
The ability to execute
complex signal
processing and machine learning tasks in real-time is the core of
autonomy. In airborne devices such as Unmanned Aerial Vehicles (UAV),
the hardware limitations imposed by the weight constraint make the
continuous execution of these algorithms challenging. Edge and fog
computing can mitigate such limitations and boost the system and
mission-level performance of the UAVs. However, due to the UAVs motion
characteristics and complex dynamics of urban environments, the
performance of pipelines using interconnected, rather than onboard,
resources can quickly degrade. We are designing and building a system
called "Hydra", an architecture for the establishment of flexible
sensing-analysis-controlpipelines over autonomous airborne systems. We
introduce the concept of information autonomy to extend autonomy to
encompass how information-related tasks are
handled in this challenging scenarios. We
motivate the need for “Information Autonomy” based on our
observations from real-world experiments and
build a self-adaptive framework for
edge-assisted UAV applications.
ICC 2020, Mobicom HotEdgeVideo 2019, MILCOM 2019, Sigcomm MAGESys 2019
Collaborators: Davide Callegaro (UCI), Yoshitomo Matsubara (UCI),
Marco Levorato (UCI), Gowri Ramachandran (USC), Bhaskar Krishnamachari
(USC)
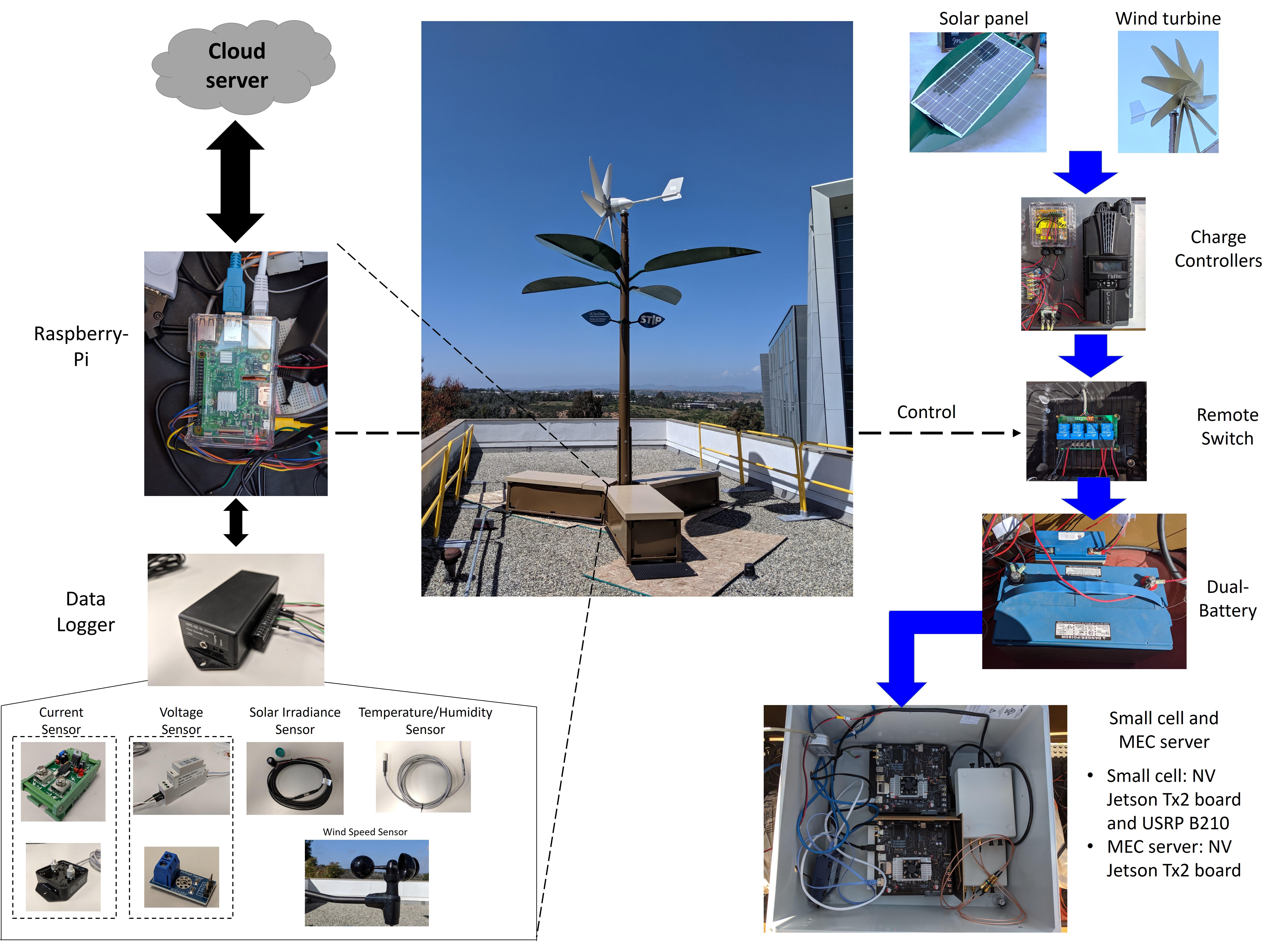
Since base stations (BSs) consume 80%
of the total power in cellular
networks, the need to reduce the power consumption of the BSs is
crucial for energy-efficient cellular networks. Renewable energy (RE)
is a promising solution to reduce grid energy consumption and carbon
emissions of BSs. However, the benefit of utilizing Renewable Energy
(RE) is limited by its highly intermittent and unreliable nature,
resulting in low savings in grid energy. Our objective is to maximize
utilization of harvested RE at the BSs with minimal use of energy
storage (battery), thereby enabling the use of renewable energy
feasible at low-cost. With the RE-powered Small Cell (SC) testbed, we
aim at developing a machine learning model to predict the remaining
operation time of a small cell based on the current system and demand
status. The feature set includes historical communication traffic,
computing demand, solar and wind energy generation profile,
environmental factors such as temperature and humidity.
Collaborators: Yujen Ku (UCSD), Sujit Dey (UCSD)

Unmanned
Aerial Vehicle (UAV) systems are being increasingly used in a broad
range of scenarios and applications. However, their deployment in urban
areas poses important technical challenges in communications between
the ground stations and the UAVs in a highly dynamic and crowded
spectrum. Indeed, competing data streams may create local or temporary
congestion impairing the ground stations to control the UAVs. We
design a robust multi-path communication framework for UAV
systems. The framework continuously probes the performance of
multiple wireless multi-hop paths from the ground stations to each UAV,
and dynamically selects the path providing the best performance to
support timely control. Based on a real-world implementation and
extensive field experimentation with 3DR Solo drone, we demonstrate the
ability of the proposed framework to provide robust control against
exogenous interference and network congestion. We also created a fully
open-sourced intergrated UAV-network simulator called "FlyNestSim" to
simulate wide range of UAV communication scenarios.
DCOSS 2020, SECON CPC-UAV 2018, MSWiM 2018, FlyNetSim Code
Collaborators : Zoheb Shaikh (UCI), Marco Levorato (UCI)
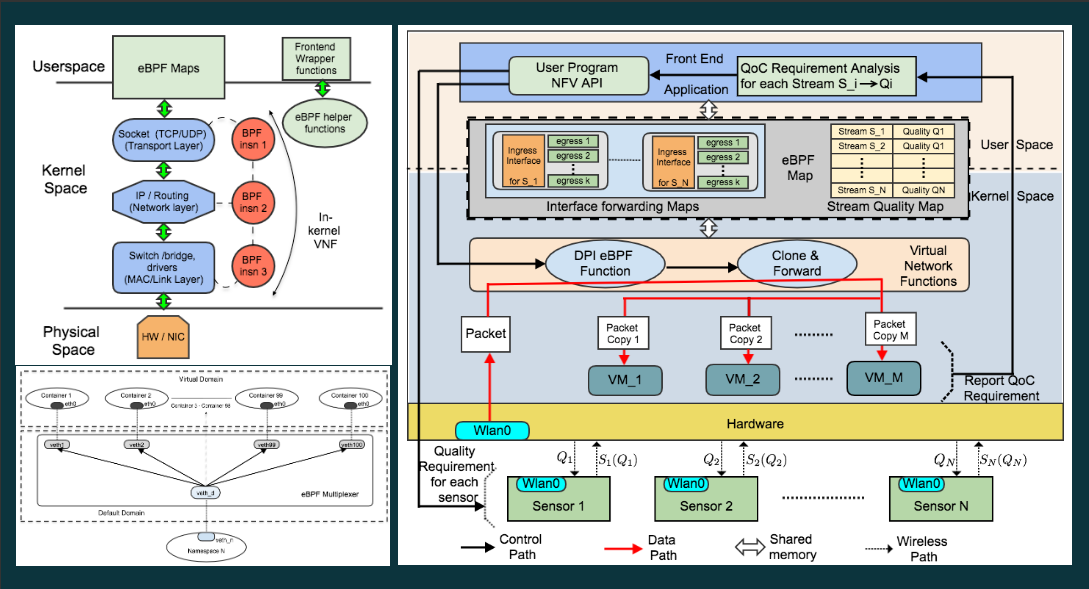
By placing computation resources within one-hop wireless topology, the recent edge computing paradigm is a keyenabler of real-time Internet of Things (IoT) applications. In the context of IoT scenarios where the same information from a sensor is used by multiple applications at different locations, the data stream needs to be replicated. However, the transportation of parallel streams might not be feasible due to limitations in the capacity of the network transporting the data. To address this issue, a content and computation-aware communication control framework is proposed based on the Software Defined Network(SDN) paradigm. The framework supports multi-streaming using the extended Berkeley Packet Filter (eBPF), where the traffic flow and packet replication for each specific computation process is controlled by a program running inside an in-kernel Virtual Machine (VM). This reduces the amount of data to be forwarded in the higher layer, and minimizes the socket buffer allocation; thus, saving both system resources and latency.
INFOCOM SCAN 2018, INFOCOM SCAN 2017, eBPF-cast Code
Collaborators : Yan Chen (Huawei Research Lab, CA), Marco Levorato (UCI)
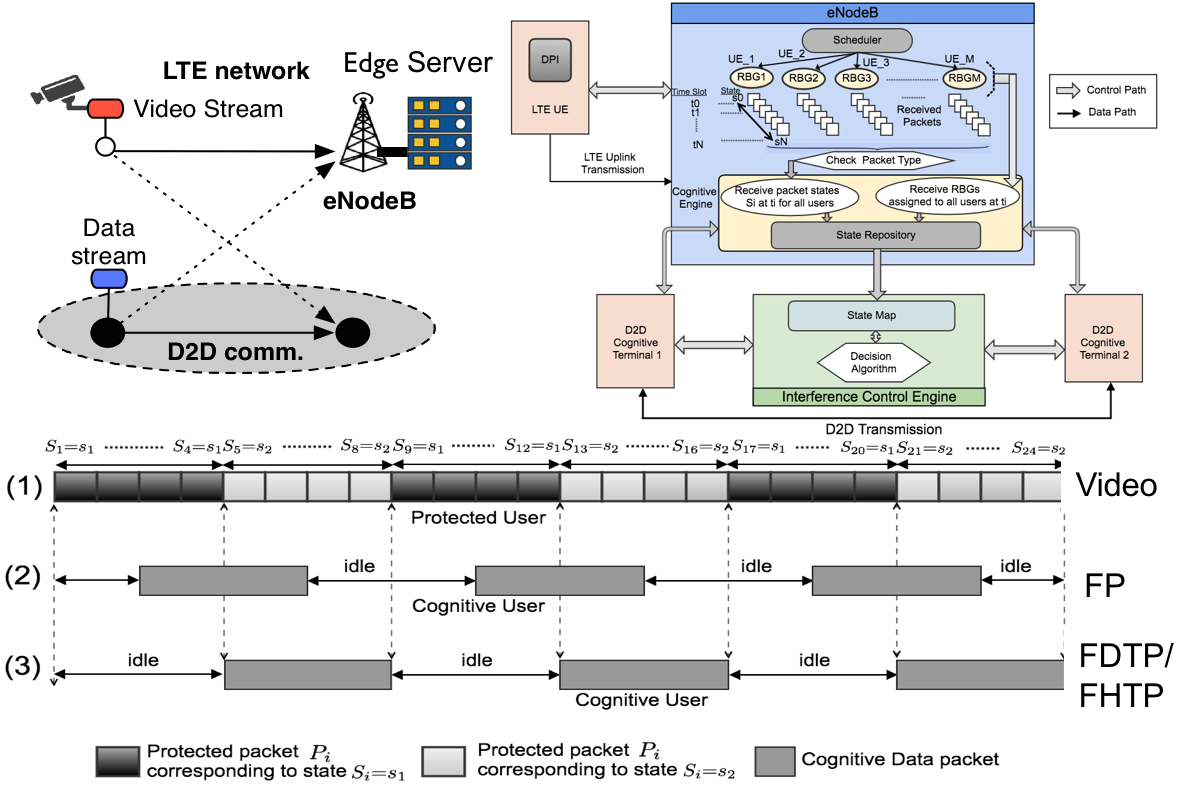
We
propose a novel cognitive interference control framework for
heterogeneous local access networks supporting computingand data
processing in urban Internet of Things (IoT) systems. The notion of
cognitive content-aware interference control is introduced, where the
transmission pattern of cognitive nodes is dynamically adapted to the
state of “protected” IoT data streams. The state describes the
performance degradation that interference would cause to algorithms
processing the data if the cognitive nodes chose to transmit in the
corresponding time period. The framework is instantiated for a
case-study scenario, where device-to-device (D2D) and long-term
evolution communications coexist on the same channel resource. A
city-monitoring application is considered, where the state captures the
type of frames within a multimedia video stream processed at the edge
of the network to detect and track objects. The proposed transmission
strategy significantly increase throughput of local D2D communications
for a target accuracy of the monitoring application.
IEEE TCCN 2018, Springer 2018, ICNC 2017, Globecom 2016
Collaborator : Marco Levorato (UCI)
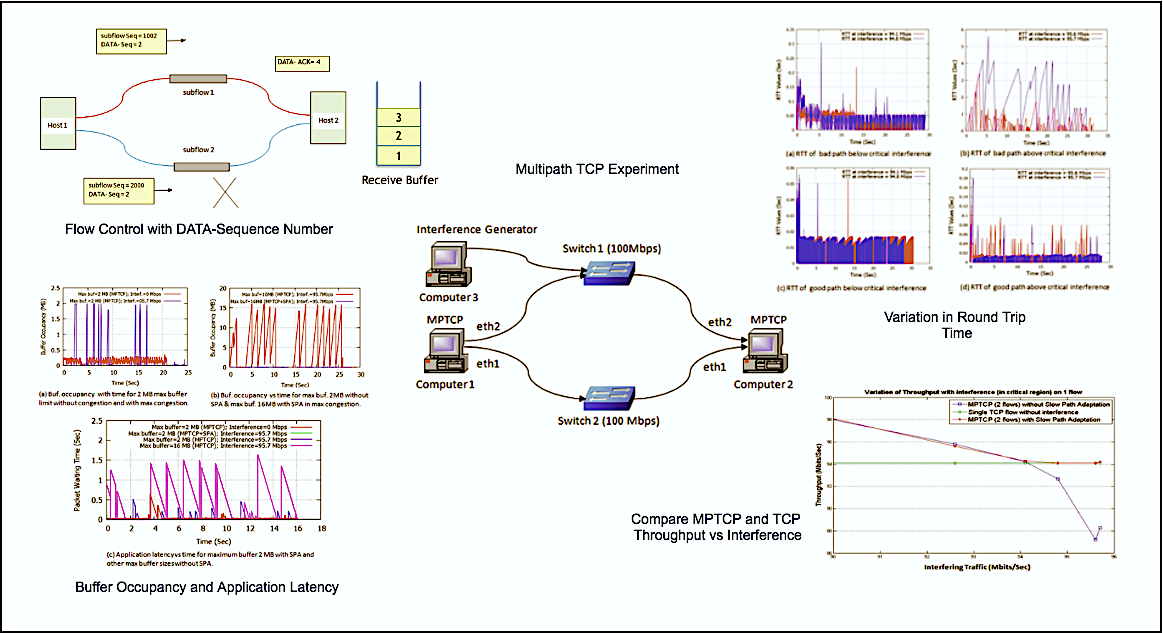
Multipath
Communications is one of the key enabler to improve the data throughput
and hence the performance of the applications. If multiple paths are
used simultaneously, e.g., Multipath TCP (MPTCP), the assymetry in the
quality of different paths can cause out-of-order packets and hence the
buffer boat problem which affects the latency and jitter of the
application. We propose slow-path adaptation technique that monitors
quality of all the available paths, and based on threshold decides to
selectively retransmit delayed packets over faster path while reducing
the transmission rate on the slow-path to the minimum until its quality
improves. It improves the MPTCP performance in high asymmetric
conditions and never falls below achievable TCP level throughput. In
case of complex and real-time applications, selecting the best path can
yields better result. By incorporating data-driven prediction
mechanism, we select the best available paths dynamically for real-time
applications without any significant affect on the monitored paths.
ICC EML5G 2020,
IEEE
ICC 2014,
UTD-CS 2013
Collaborators : Peyman Tehrani (UCI), Marco Levorato (UCI), Promod Shirol (UT Dallas), Abhishek Basu (UT Dallas), Dr. Ravi Prakash (UT Dallas)